
现在使用的电子设备大部分都支持触控操作,如手机、平板电脑,这些设备上的应用基本都依赖触摸事件的一些特性,如根据触摸事件移动速度计算视图控件的动画效果。在Android的API中提供了VelocityTracker类用于计算触摸事件MotionEvent的速度,而其内部默认使用的方法就是最小二乘法,本文主要介绍其实现原理,以便应用到自己的非Android应用中。
匀速运动
如果用(p(x,y)) (t)表示触摸事件点的坐标和时间,已知两个点(p_0(x_0,y_0)) (p_1(x_1,y_1))和时间(t_0) (t_1),那么可以使用最简单的方法计算触摸事件点的移动速度:
使用这种方法的前提条件是接受触摸事件点是匀速运动,加速度等于零:(overrightarrow{A}=0)
恒定加速度
假定触摸事件点的运动速度为(v),加速度为(a),时间为(t),则触摸事件的运动方程为:
现在已知一系列触摸事件点(p)和每个触摸点对应的时间(t),那么如何求得当前触摸事件点的速度(v)和加速度(a)呢?
最小二乘法
将运动方程写成矩阵形式:
假设测量(采集)的数据集为:
如果用(hat{bm{beta}})表示运动模型参数的估计值,那么运动模型结果估计值可以表示为:
用(bm{Y}-hat{bm{Y}})表示测量(采集)值与估计值之间的误差,那么当误差平方最小时,此时的(hat{bm{beta}})就是需要求取的运动模型参数值:
当上式对(beta_0)、(beta_1) 和(beta_2)进行偏导为0时其值最小:
使用消元法进行求解,先将式((10))和((11))中的(beta_0)消去:
再将式((12))和((13))中的(beta_1)消去得到(beta_2):
将上式中的(sum_{i=0}^{n})用(S)代替,这样可以让公式更加直观:
将式((12))和((13))中的(beta_2)消去得到(beta_1):
式((16))和((19))中(beta_1)和(beta_2)的分母是保持一致的,将求得的(beta_1)和(beta_2)带入式((9))可以求得(beta_0):
上述最小二乘法的消元法求解过程也是Android的VelocityTracker.cpp中使用的方法。
最小二乘法求解触摸事件的速度
随着时间的推移,过时的触摸事件点已经对当前速度计算的贡献几乎为0,因此只采用最近的20个触摸事件点,(x)和(y)两个方向分别进行计算,同时由于时间值精确到毫秒(甚至纳秒),那么使用上述方式计算可能会数值溢出,因此采用将触摸事件点的时间减去最新点的时间。
在计算触摸事件的速度之前,先将触摸点数据提前采集下来。可以使用MotionEventWriter进行采集,数据格式为:(x,y,time),如:
533.0,471.0,5814487,533.0,471.0,5814496,532.0,472.0,5814506,531.71063,472.28937,5814509,531.0,473.0,5814515,527.8412,476.7906,5814523,526.0,479.0,5814527,517.0,490.0,5814537,514.4475,493.1197,5814539,505.0,504.0,5814546,490.0,522.0,5814556,489.4248,522.69025,5814556,472.0,546.0,5814565,461.23355,559.93304,5814573,455.0,568.0,5814577,429.0,602.0,5814587,421.55008,611.7422,5814589,402.0,640.0,5814596,376.0,677.0,5814606,375.41675,677.83,5814606,349.0,715.0,5814615,334.97095,736.6281,5814622,325.0,752.0,5814627,302.0,791.0,5814637,296.88904,799.6664,5814639,280.0,827.0,5814646,258.86536,862.5446,5814655,258.0,864.0,5814656,242.0,897.0,5814665,234.13586,912.7283,5814672,228.0,925.0,5814677,219.0,949.0,5814686,217.04567,954.21155,5814688,214.0,967.0,5814696,214.0,980.3627,5814705,214.0,981.0,5814706,218.0,988.0,5814715,223.07028,988.56335,5814722,227.0,989.0,5814727,242.0,983.0,5814736,245.16205,981.73517,5814738,263.0,971.0,5814746,286.52478,955.0032,5814755,288.0,954.0,5814756,317.0,931.0,5814765,335.05908,916.89136,5814772,349.0,906.0,5814777,385.0,875.0,5814786,392.34656,868.6738,5814788,423.0,844.0,5814796,456.2187,816.47595,5814805,458.0,815.0,5814806,488.0,792.0,5814815,503.0,780.5,5814820,518.0,768.0,5814828,544.0,751.0,5814836,549.912,747.13446,5814838,564.0,741.0,5814846,578.31866,737.1817,5814855,579.0,737.0,5814856,584.0,743.0,5814865,583.43176,749.25073,5814872,583.0,754.0,5814877,575.0,776.0,5814886,573.2179,780.9007,5814889,564.0,801.0,5814896,546.5539,833.9538,5814905,546.0,835.0,5814906,525.0,873.0,5814915,510.8347,896.6089,5814922,501.0,913.0,5814927,476.0,957.0,5814937,470.13397,967.3242,5814939,450.0,1001.0,5814946,425.18634,1041.6943,5814955,425.0,1042.0,5814955,406.0,1076.0,5814965,396.41208,1094.5767,5814972,390.0,1107.0,5814977,374.0,1141.0,5814986,370.01813,1149.4615,5814989,362.0,1170.0,5814996,354.00723,1192.9791,5815005,354.0,1193.0,5815005,352.0,1207.0,5815015,353.19043,1212.9521,5815022,354.0,1217.0,5815027,363.0,1221.0,5815036,365.1823,1221.97,5815039,376.0,1221.0,5815046,389.87677,1216.044,5815055,390.0,1216.0,5815055,413.0,1203.0,5815065,430.8009,1191.1327,5815072,443.0,1183.0,5815077,484.0,1153.0,5815086,493.81314,1145.8197,5815088,533.0,1115.0,5815096,583.2924,1073.5828,5815105,584.0,1073.0,5815105,631.0,1035.0,5815115,659.047,1012.79614,5815122,679.0,997.0,5815127,732.0,958.0,5815136,744.9325,948.48364,5815138,956.0,811.0,5815146,956.0,811.0,5815156 为了更加直观,使用下面的python脚本将触摸点数据绘制出来:
import sys import matplotlib.pyplot as plt import numpy as np def load_points_from_file(filepath): data = np.loadtxt(filepath, delimiter=',').reshape(-1, 3) return data filepath = "pointer_data_20250817_100135.txt" if len(sys.argv) > 1: filepath = sys.argv[1] points = load_points_from_file(filepath) x = points[:, 0] y = points[:, 1] plt.scatter(x, y, c='r', marker='o') plt.xlabel("x") plt.ylabel("y") plt.show() 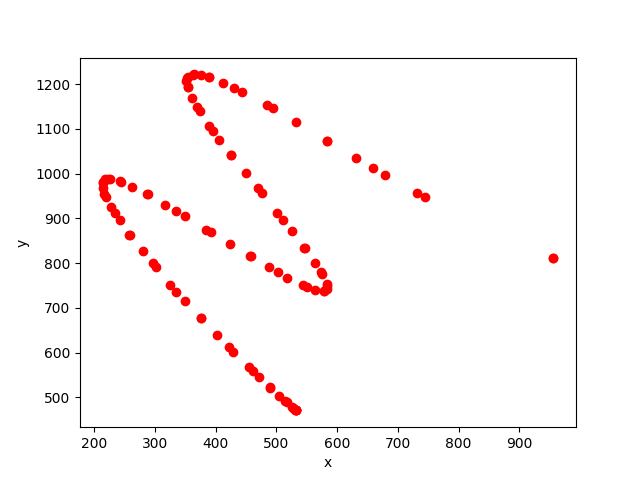
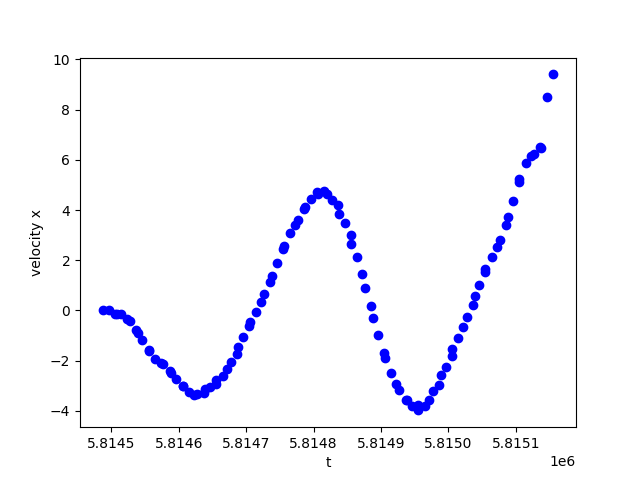
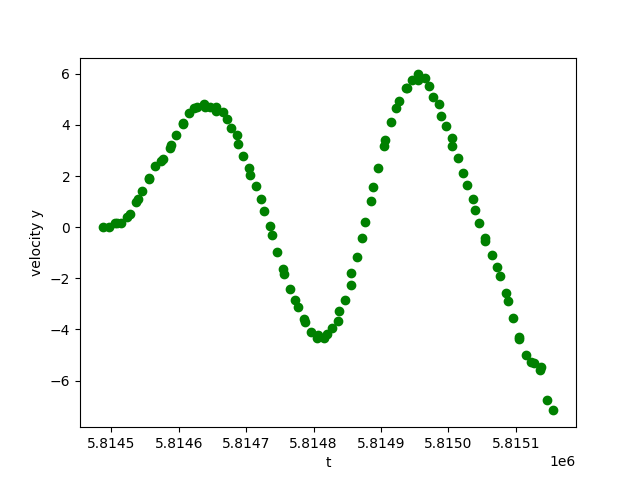
参照AndroidVelocityTracker.cpp的实现,根据公式((16)) ((19)) ((20))分别对(x)和(y)计算恒加速运动模型参数:
import sys import matplotlib.pyplot as plt import numpy as np def solve_least_squares_deg2(y, t): Sy = 0.0 St = 0.0 St2 = 0.0 St3 = 0.0 St4 = 0.0 Syt = 0.0 Syt2 = 0.0 for i in range(y.shape[0]): ti = t[i] yi = y[i] t2 = ti * ti t3 = t2 * ti t4 = t3 * ti Sy += yi St += ti St2 += t2 St3 += t3 St4 += t4 Syt += yi * ti Syt2 += yi * t2 n = len(y) denominator = (St * St2 / n - St3) * (St * St2 / n - St3) - (St2 * St2 / n - St4) * (St * St / n - St2) if denominator == 0: return None b2 = ((Sy * St / n - Syt) * (St * St2 / n - St3) - (Sy * St2 / n - Syt2) * (St * St / n - St2)) / denominator b1 = ((Sy * St2 / n - Syt2) * (St * St2 / n - St3) - (Sy * St / n - Syt) * (St2 * St2 / n - St4)) / denominator b0 = Sy / n - b1 * St / n - b2 * St2 / n return np.array([b0, b1, b2]) def velocity_estimate(x, y, t): n = len(x) res_x = np.array([]) res_y = np.array([]) for i in range(n): s = 0 if i > 20: s = i - 20 e = i + 1 sx = x[s:e].copy() sy = y[s:e].copy() st = t[s:e].copy() for j in range(len(st)): st[j] = st[j] - t[i] param_y = solve_least_squares_deg2(sy, st) param_x = solve_least_squares_deg2(sx, st) if param_y is not None: res_y = np.append(res_y, param_y[1]) else: res_y = np.append(res_y, 0) if param_x is not None: res_x = np.append(res_x, param_x[1]) else: res_x = np.append(res_x, 0) return res_x, res_y def load_points_from_file(filepath): data = np.loadtxt(filepath, delimiter=',').reshape(-1, 3) return data filepath = "pointer_data_20250817_100135.txt" if len(sys.argv) > 1: filepath = sys.argv[1] points = load_points_from_file(filepath) x = points[:, 0] y = points[:, 1] t = points[:, 2] res = velocity_estimate(x, y, t) vx = res[0] vy = res[1] plt.figure(1) plt.scatter(x, y, c='r', marker='o') plt.xlabel("x") plt.ylabel("y") plt.figure(2) plt.scatter(t, vx, c='b', marker='o') plt.xlabel("t") plt.ylabel("velocity x") plt.figure(3) plt.scatter(t, vy, c='g', marker='o') plt.xlabel("t") plt.ylabel("velocity y") plt.show() 最终计算得到(x)和(y)方向的速度变化图:
参考
[2] 最小二乘法_百度百科
[3] MotionEvent




![洛谷 P11345 [KTSC 2023 R2] 基地简化 题解](http://www.itfaba.com/wp-content/themes/kemi/timthumb.php?src=http://www.itfaba.com/wp-content/themes/kemi/img/random/1.jpg&w=218&h=124&zc=1)
