
本文分享自华为云社区《MindSpore强化学习:使用PPO配合环境HalfCheetah-v2进行训练》,作者: irrational。
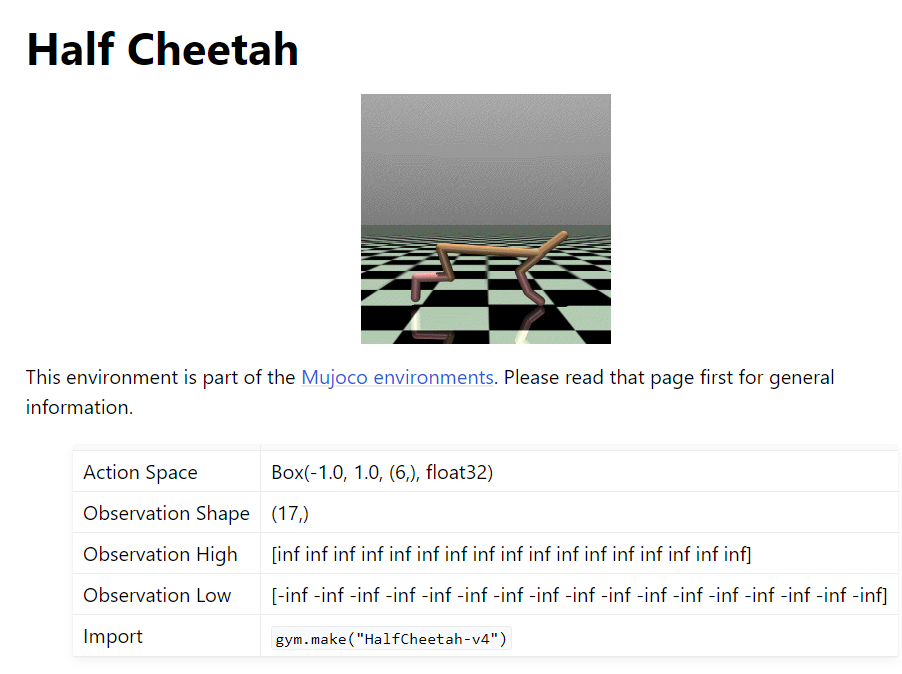
半猎豹(Half Cheetah)是一个基于MuJoCo的强化学习环境,由P. Wawrzyński在“A Cat-Like Robot Real-Time Learning to Run”中提出。这个环境中的半猎豹是一个由9个链接和8个关节组成的2D机器人(包括两个爪子)。在这个环境中,目标是通过施加扭矩在关节上使猎豹尽可能快地向前(向右)奔跑,正向奖励基于前进的距离,而向后移动则会得到负向奖励。猎豹的躯干和头部是固定的,扭矩只能施加在前后大腿、小腿和脚上。
动作空间是一个Box(-1, 1, (6,), float32),其中每个动作代表链接之间的扭矩。观察空间包含猎豹不同身体部位的位置值和速度值,其中所有位置值在前,所有速度值在后。默认情况下,观察不包括猎豹质心x坐标,可以通过在构建时传递exclude_current_positions_from_observation=False来包括它。如果包括,观察空间将有18个维度,其中第一个维度代表猎豹质心的x坐标。
奖励分为两部分:向前奖励和控制成本。向前奖励是根据动作前后x坐标的变化计算的,控制成本是为了惩罚猎豹采取过大动作的成本。总奖励是向前奖励减去控制成本。
每个状态的开始是在状态(0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,)上添加噪声以增加随机性。前8个值是位置值,最后9个值是速度值。位置值添加均匀噪声,而初始速度值(全为零)添加标准正态噪声。
当一个剧集的长度超过1000时,该剧集将被截断。
该环境的详细信息可以参考:https://www.gymlibrary.dev/environments/mujoco/half_cheetah/

这个比很多环境都要复杂。
不过没关系,我们有ppo算法,这个算法可以跑强化学习,甚至大语言模型。
PPO(Proximal Policy Optimization)算法是一种用于强化学习的策略优化方法,它旨在解决传统策略梯度方法(如TRPO,Trust Region Policy Optimization)中的信任区域问题
PPO算法通过引入clipping技巧和重要性采样技巧来减少计算梯度时的方差,从而提高算法的收敛速度和稳定性。
在PPO算法中,有两个关键概念:
- 策略(Policy):策略是一个函数,它定义了在给定状态s时采取动作a的概率分布。
- 价值函数(Value Function):价值函数估计了在给定策略下,从状态s出发,到达某个特定状态或终端时所能获得的期望回报。
PPO算法的主要步骤包括:
- 采样(Sampling):从当前策略中采样数据,包括状态、动作、奖励和下一个状态。
- 计算目标(Calculating Targets):使用目标策略计算目标价值函数,并计算目标策略的KL散度。
- 更新策略(Updating Policy):使用重要性采样技巧和clipping技巧更新策略。
- 更新价值函数(Updating Value Function):使用策略梯度方法更新价值函数。
PPO算法的核心思想是交替更新策略和价值函数,以实现策略和价值的共同优化。这种方法可以有效减少计算梯度时的方差,提高算法的收敛速度和稳定性。
以下是PPO算法的一个简化的Markdown公式:
# Proximal Policy Optimization (PPO) Algorithm ## 1. Sampling 采样当前策略的数据,包括状态 $ s $、动作 $ a $、奖励 $ r $ 和下一个状态 $ s' $。 ## 2. Calculating Targets 使用目标策略计算目标价值函数,并计算目标策略的KL散度。 ## 3. Updating Policy 使用重要性采样技巧和clipping技巧更新策略。 ## 4. Updating Value Function 使用策略梯度方法更新价值函数。 ## 重复步骤1-4,实现策略和价值的共同优化。
这个公式是一个简化的版本,实际上PPO算法还包括了许多其他细节和技巧,如经验回放、动态调整学习率等。
import argparse import os from mindspore import context from mindspore import dtype as mstype from mindspore.communication import get_rank, init import mindspore_rl.distribution.distribution_policies as DP from mindspore_rl.algorithm.ppo import config from mindspore_rl.algorithm.ppo.ppo_session import PPOSession from mindspore_rl.algorithm.ppo.ppo_trainer import PPOTrainer parser = argparse.ArgumentParser(description="MindSpore Reinforcement PPO") parser.add_argument("--episode", type=int, default=650, help="total episode numbers.") parser.add_argument( "--device_target", type=str, default="Auto", choices=["Ascend", "CPU", "GPU", "Auto"], help="Choose a device to run the ppo example(Default: Auto).", ) parser.add_argument( "--precision_mode", type=str, default="fp32", choices=["fp32", "fp16"], help="Precision mode", ) parser.add_argument( "--env_yaml", type=str, default="../env_yaml/HalfCheetah-v2.yaml", help="Choose an environment yaml to update the ppo example(Default: HalfCheetah-v2.yaml).", ) parser.add_argument( "--algo_yaml", type=str, default=None, help="Choose an algo yaml to update the ppo example(Default: None).", ) parser.add_argument( "--enable_distribute", type=bool, default=False, help="Train in distribute mode (Default: False).", ) parser.add_argument( "--worker_num", type=int, default=2, help="Worker num (Default: 2)." ) parser.add_argument( "--graph_op_run", type=int, default=1, help="Run kernel by kernel (Default: 1)." ) options, _ = parser.parse_known_args()`
wget https://www.roboti.us/download/mujoco200_linux.zip mv mujoco200_linux ~/.mujoco/mujoco200 wget https://www.roboti.us/file/mjkey.txt cp mjkey.txt /home/kewei/.mujoco/mjkey.txt wget https://download-ib01.fedoraproject.org/pub/epel/7/x86_64/Packages/p/patchelf-0.12-1.el7.x86_64.rpm yum localinstall patchelf-0.12-1.el7.x86_64.rpm pip install 'mujoco_py==2.0.2.13'
第一次编译mujoco会有一点久
在bashrc加入如下内容:
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:~/.mujoco/mujoco200/bin export MUJOCO_KEY_PATH=~/.mujoco${MUJOCO_KEY_PATH} export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/kewei/.mujoco/mujoco210/bin export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/nvidia
然后就可以开启训练了。使用上一节的with保留输入。
# dqn_session.run(class_type=DQNTrainer, episode=episode) with RealTimeCaptureAndDisplayOutput() as captured_new: ppo_session.run(class_type=PPOTrainer, episode=episode, duration=duration)




![洛谷 P11345 [KTSC 2023 R2] 基地简化 题解](http://www.itfaba.com/wp-content/themes/kemi/timthumb.php?src=http://www.itfaba.com/wp-content/themes/kemi/img/random/1.jpg&w=218&h=124&zc=1)
