
优先级翻转曾导致 1997 年火星探路者号(Mars Pathfinder)任务故障,是 RTOS 开发中必须掌握的经典问题。本文通过 RT-Thread 实验,彻底搞清楚它的原理和解决方案。
火星探路者号故障原文链接:
一、什么是优先级翻转?
定义: 高优先级任务被低优先级任务间接阻塞,导致系统行为违反优先级调度原则。简单说:高优先级任务反而要等低优先级任务执行完,优先级"翻转"了。
经典场景
假设系统中有三个任务:
| 任务 | 优先级 | 说明 |
|---|---|---|
| Task_H | 8 (最高) | 实时性要求高 |
| Task_M | 15 (中等) | CPU 密集型任务 |
| Task_L | 22 (最低) | 持有共享资源 |
注:RT-Thread 中数值越小优先级越高
翻转发生过程:
时间线 ──────────────────────────────────────────────────────────────► 1. Task_L 运行,获取锁(信号量) 2. Task_H 就绪,抢占 Task_L,尝试获取锁 → 阻塞等待 3. Task_L 恢复运行...但此时 Task_M 就绪 Task_M 优先级比 Task_L 高 → 抢占 Task_L! 4. 问题发生: - Task_H(最高优先级)在等锁 - Task_L(持有锁)被 Task_M 抢占,无法运行 - Task_M(中优先级)却在运行! 结果:Task_H 被 Task_M 间接阻塞 —— 优先级翻转! 二、为什么这是严重问题?
- 实时性破坏:高优先级任务的响应时间变得不可预测
- 无界延迟:如果有多个中优先级任务,Task_H 可能被无限期延迟
- 系统失效:火星探路者号就因此不断重启
三、解决方案:优先级继承
原理
当高优先级任务等待低优先级任务持有的资源时,临时提升低优先级任务的优先级到与等待者相同的级别。
修正后的时序: 1. Task_L 持有锁(优先级 22) 2. Task_H 请求锁 → 阻塞 3. 系统检测到优先级翻转风险 : → Task_L 的优先级临时提升到 8(与 Task_H 相同) 4. Task_M 就绪(优先级 15),但 Task_L 现在优先级是 8 → 15 > 8,Task_M 无法抢占 Task_L 5. Task_L 完成临界区,释放锁 → Task_L 优先级恢复为 22 6. Task_H 获得锁,立即运行 7. Task_H 完成后,Task_M 才开始运行 RT-Thread 中的实现
关键点:RT-Thread 的 rt_mutex 默认支持优先级继承!
/* 互斥锁 - 自动支持优先级继承 */ rt_mutex_t mutex = rt_mutex_create("mutex", RT_IPC_FLAG_PRIO); /* 信号量 - 没有优先级继承! */ rt_sem_t sem = rt_sem_create("sem", 1, RT_IPC_FLAG_PRIO); 四、实验验证
实验设计
编写一个 Demo,分别使用信号量和互斥锁作为锁机制,对比两种情况下的任务执行顺序和等待时间。
核心代码:
#include <rtthread.h> /* 配置:0=信号量(会翻转), 1=互斥锁(有继承) */ #define USE_MUTEX 0 /* 任务优先级 */ #define PRIO_HIGH 8 #define PRIO_MEDIUM 15 #define PRIO_LOW 22 #if USE_MUTEX static rt_mutex_t g_lock; #else static rt_sem_t g_lock; #endif /* 高优先级任务 */ static void thread_high_entry(void *param) { rt_thread_mdelay(50); /* 确保 Task_L 先获取锁 */ log_msg("Task_H", "Try to acquire lock..."); #if USE_MUTEX rt_mutex_take(g_lock, RT_WAITING_FOREVER); #else rt_sem_take(g_lock, RT_WAITING_FOREVER); #endif log_msg("Task_H", ">>> GOT LOCK! <<<"); /* ... 工作 ... */ #if USE_MUTEX rt_mutex_release(g_lock); #else rt_sem_release(g_lock); #endif } /* 中优先级任务 - CPU 密集型,不使用锁 */ static void thread_medium_entry(void *param) { rt_thread_mdelay(80); /* 在 Task_H 阻塞后启动 */ log_msg("Task_M", "=== START! Busy loop ==="); /* 忙等待,占用 CPU */ for (int i = 0; i < 5; i++) { volatile uint32_t cnt = 0; while (cnt < 2000000) cnt++; } log_msg("Task_M", "=== DONE ==="); } /* 低优先级任务 - 持有锁 */ static void thread_low_entry(void *param) { #if USE_MUTEX rt_mutex_take(g_lock, RT_WAITING_FOREVER); #else rt_sem_take(g_lock, RT_WAITING_FOREVER); #endif log_msg("Task_L", "GOT lock, working..."); /* 临界区:忙等待 ~240ms */ for (int i = 0; i < 8; i++) { volatile uint32_t cnt = 0; while (cnt < 800000) cnt++; } log_msg("Task_L", "Release lock"); #if USE_MUTEX rt_mutex_release(g_lock); #else rt_sem_release(g_lock); #endif } 实验结果
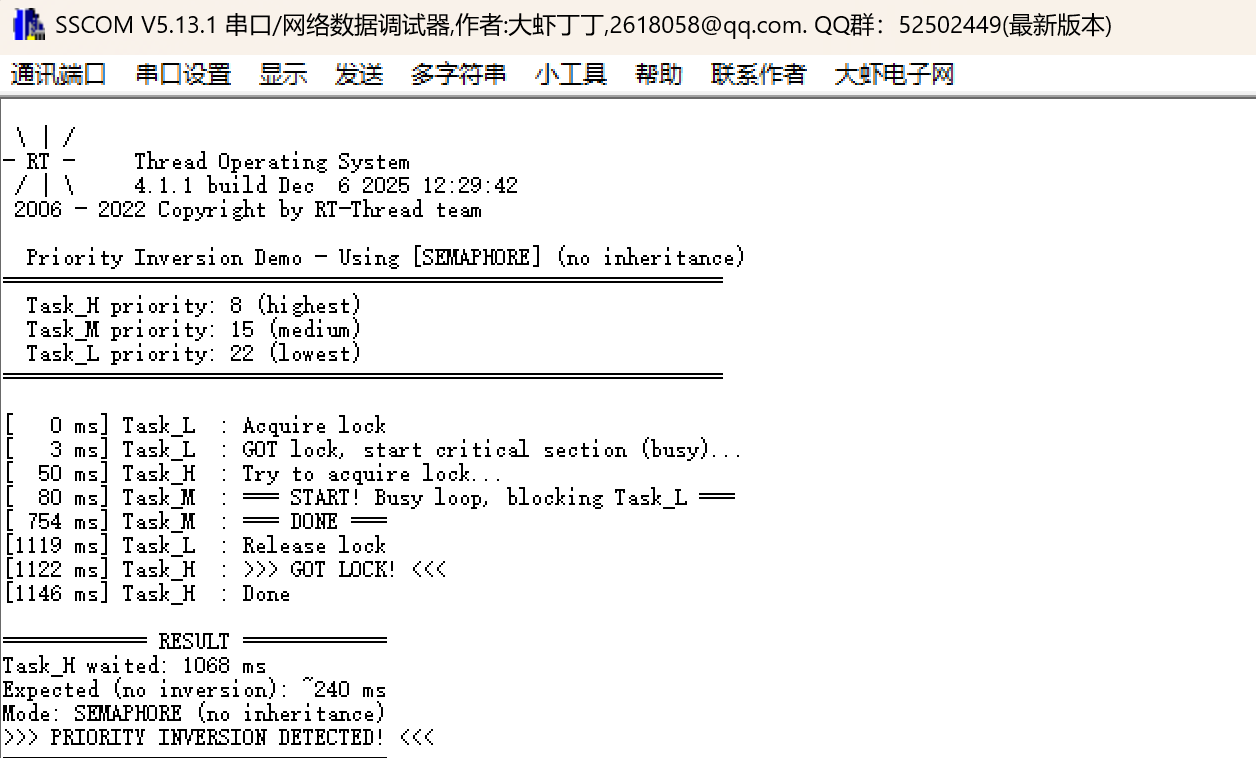
信号量模式(USE_MUTEX = 0)—— 发生优先级翻转
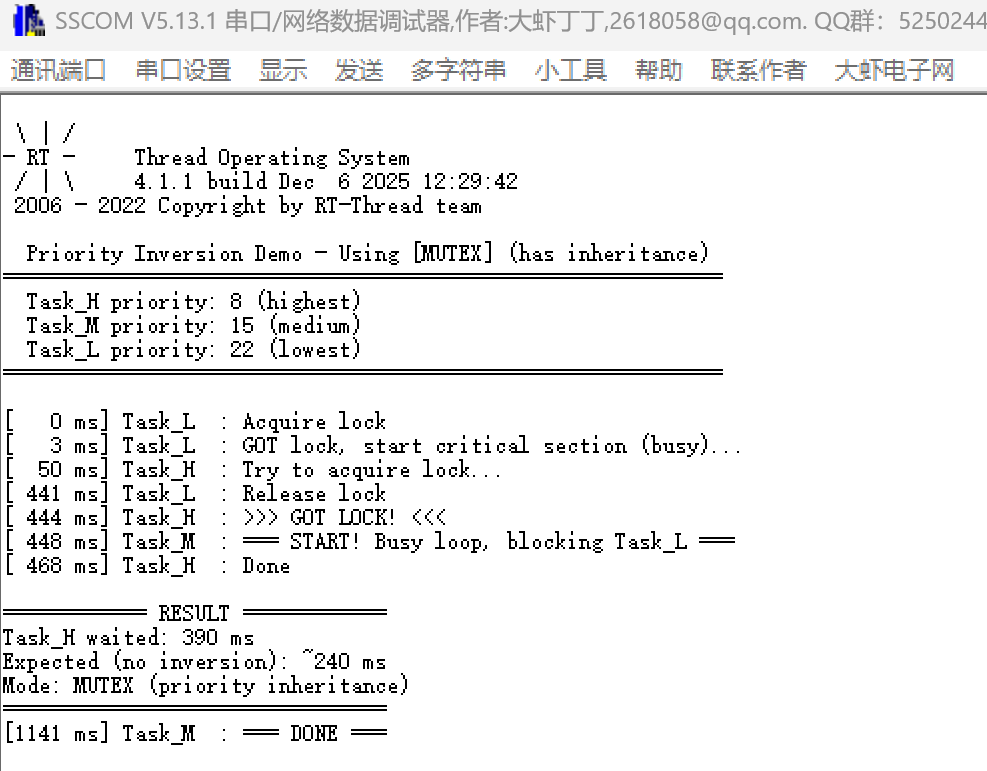
互斥锁模式(USE_MUTEX = 1)—— 优先级继承生效
结果对比
| 指标 | 信号量 (无继承) | 互斥锁 (有继承) |
|---|---|---|
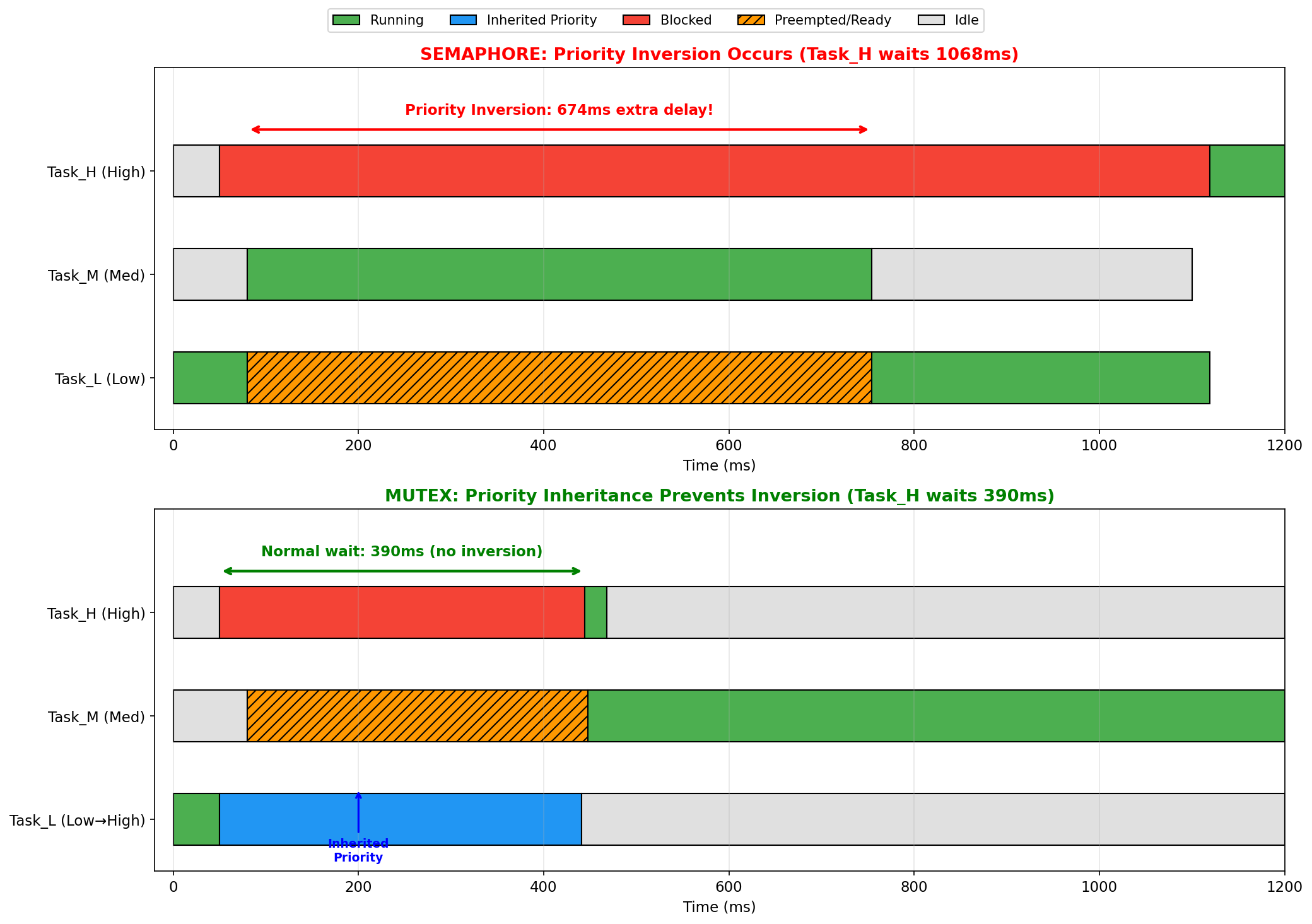
| Task_H 等待时间 | 1068 ms | 390 ms |
| Task_M 开始时间 | 80 ms | 448 ms |
| 优先级翻转 | ✅ 发生 | ❌ 未发生 |
| 额外延迟 | ~828 ms | 0 |
关键差异:
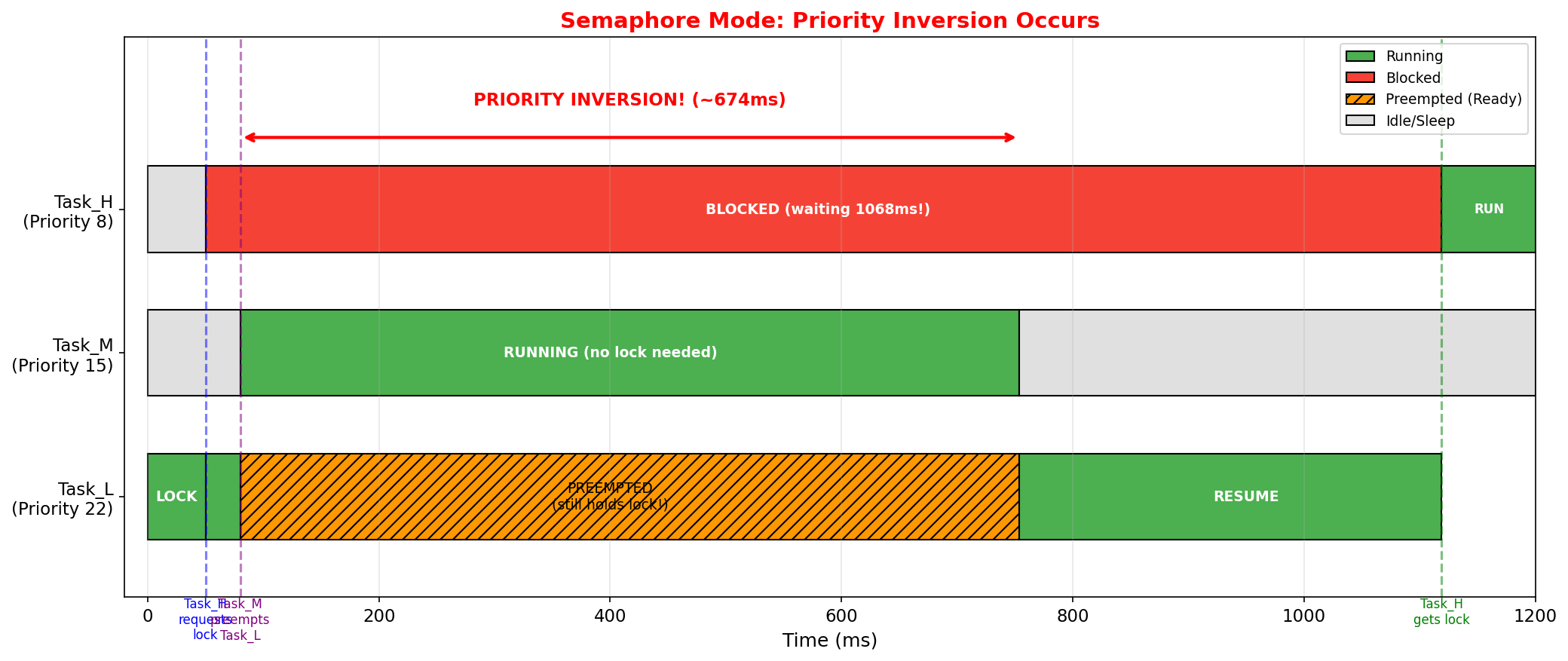
- 信号量:Task_M 在 80ms 就抢占了 Task_L,导致 Task_H 多等了 ~800ms
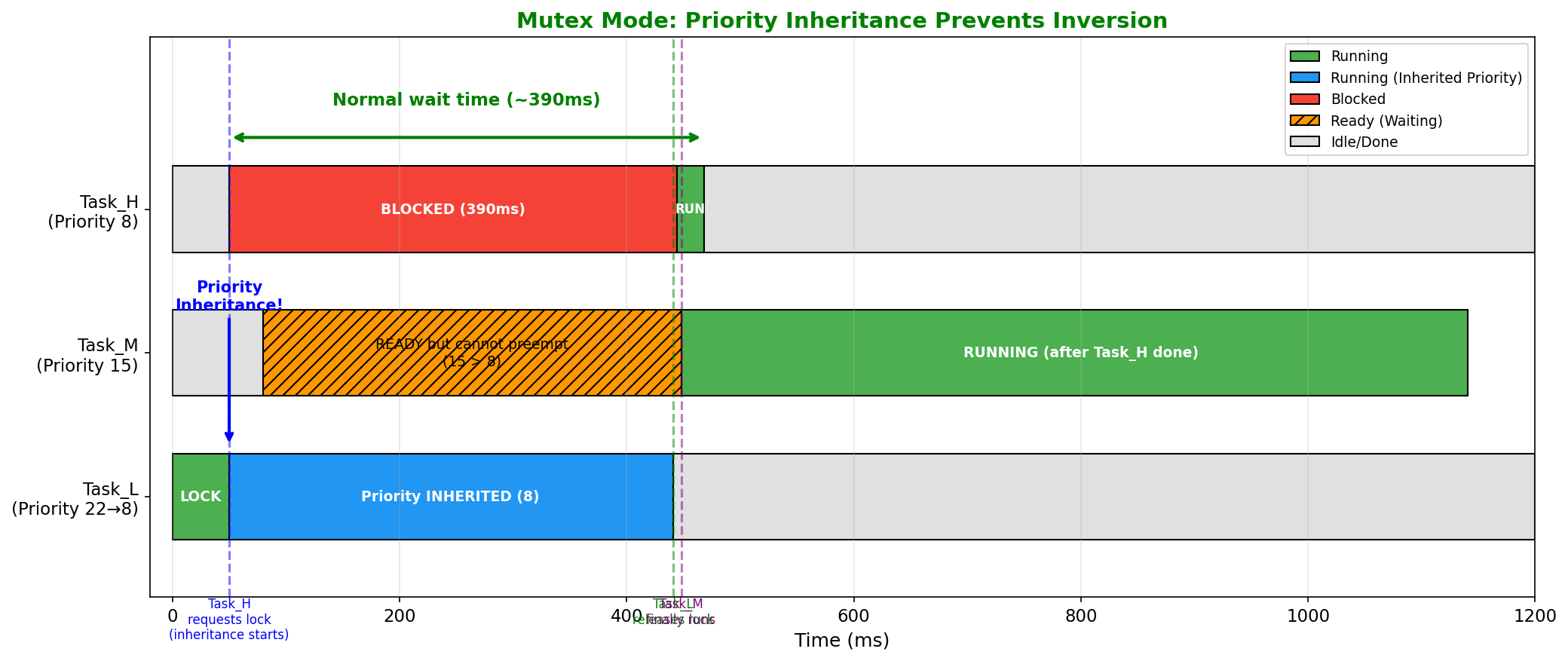
- 互斥锁:Task_L 优先级被提升,Task_M 无法抢占,在 448ms(Task_H 完成后)才开始运行
五、时序对比图
六、开发中如何避免优先级翻转
原则 1:使用 Mutex 而非 Semaphore 保护共享资源
/* ❌ 错误:信号量没有优先级继承 */ rt_sem_t lock = rt_sem_create("lock", 1, RT_IPC_FLAG_PRIO); /* ✅ 正确:互斥锁支持优先级继承 */ rt_mutex_t lock = rt_mutex_create("lock", RT_IPC_FLAG_PRIO); 原则 2:最小化临界区
/* ❌ 错误:临界区太长 */ rt_mutex_take(mutex, RT_WAITING_FOREVER); prepare_data(); /* 不需要保护 */ access_shared_resource(); /* 需要保护 */ post_process(); /* 不需要保护 */ rt_mutex_release(mutex); /* ✅ 正确:只保护必要的部分 */ prepare_data(); rt_mutex_take(mutex, RT_WAITING_FOREVER); access_shared_resource(); rt_mutex_release(mutex); post_process(); 原则 3:添加超时机制
rt_err_t result = rt_mutex_take(mutex, rt_tick_from_millisecond(100)); if (result == -RT_ETIMEOUT) { /* 超时处理:记录日志、告警、降级处理 */ LOG_W("Mutex timeout - possible priority inversion!"); } 原则 4:避免嵌套锁
/* ❌ 危险:嵌套锁可能导致复杂的优先级继承链 */ rt_mutex_take(mutex_A, RT_WAITING_FOREVER); rt_mutex_take(mutex_B, RT_WAITING_FOREVER); /* 嵌套 */ ... /* ✅ 更好:重新设计,合并资源或使用单一锁 */ rt_mutex_take(mutex_combined, RT_WAITING_FOREVER); ... 原则 5:高优先级任务尽量避免使用共享资源,为紧急任务分配独立资源
七、总结
| 问题 | 根因 | 解决方案 |
|---|---|---|
| 优先级翻转 | 低优先级持锁时被中优先级抢占 | 使用 rt_mutex(自动优先级继承) |
| 无界延迟 | 多个中优先级任务轮流抢占 | 最小化临界区 + 超时机制 |
| 设计缺陷 | 优先级差距大的任务共享资源 | 重新规划优先级或资源隔离 |
核心要点:
- ✅ 保护共享资源时,永远使用
rt_mutex_t - ✅ 临界区尽可能短
- ✅ 高优先级任务尽量避免使用共享资源
- ✅ 添加超时机制作为安全网
- ❌ 不要用
rt_sem_t当锁使用
附录:完整 Demo 代码
git clone https://github.com/SXSBJS-XYT/RT-Thread.git cd .Kernel5.PriorityInversionPriorityInversion 作者:[SXSBJS-XYT]




![洛谷 P11345 [KTSC 2023 R2] 基地简化 题解](http://www.itfaba.com/wp-content/themes/kemi/timthumb.php?src=http://www.itfaba.com/wp-content/themes/kemi/img/random/3.jpg&w=218&h=124&zc=1)
